











ロボット農機や5G関連技術で圃場間自動走行と遠隔監視制御を実現 NTTドコモなど2020年11月17日
北海道大学、岩見沢市、NTT、NTT東日本、NTTドコモは、最先端のロボット農業技術に、第5世代移動通信方式(5G)と、革新的ネットワーク技術IOWNを実現する技術の一つである複数ネットワークの最適な活用技術や、高精度な測位技術等を用いた農機の完全自動走行に向け、通信や映像の途切れを防止するなど、安定的で円滑な農機のほ場間自動走行と遠隔監視制御を実現した。
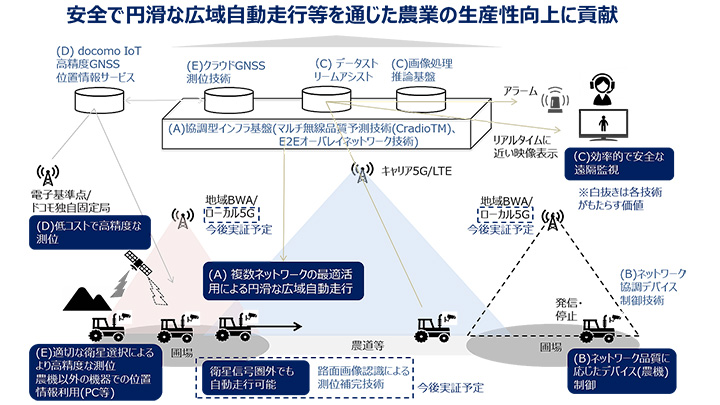 実証全体概要図
実証全体概要図
四者は、2019年6月28日に産官学連携協定を締結し、最先端の農業ロボット技術と情報通信技術の活用による世界トップレベルのスマート農業およびサステイナブルなスマートアグリシティの実現に向けた研究、技術開発等を進めてきた。
これまで、農機からの高精細映像や監視センタからの発進・停止等の制御信号の安定的な伝送をめざし、5G等の高速・大容量・低遅延のネットワークを活用して実証を進めてきたが、農機完全自動走行対応には、ほ場間での移動も含め、遠隔地からトラクタやコンバイン等の農機をモニター等で監視、制御することが必要となる。
例えば、対象の農地が5Gのサービスエリア外であったり、その無線通信の特性上、遮蔽等の影響を受けて自動運転農機が必要な通信品質を得られなかった場合、遠隔地にある監視センターへ送信する監視映像が乱れたり、途切れたりして遠隔監視の実施が難しいなどの課題がある。その解決策として、複数のネットワークを安定的に切り替えるなどの対策が有効となる。今回の実証では、以下5つの技術を実現し、その有効性を確認した。
(A)IOWNを実現する技術の一つとなる協調型インフラ基盤技術(マルチ無線品質予測技術(Cradio)、E2Eオーバレイネットワーク技術)を用いて、複数のネットワークを跨って農機が自動走行する中、通信品質の変動をAIが予測。通信の品質が劣化する前に適切なネットワークに自動で切り替えることで、遠隔監視を中断させること無く、安定的な自動走行を実現した。これらの技術は、アプリケーションに利用ネットワークを意識させない、ナチュラルな利用を可能とする、将来の移動固定融合サービスにつながる技術の1つとしても位置づけられる。
(B)ネットワーク協調デバイス制御技術を用いて、ネットワークの品質変化に応じた農機の制御指示を実現。監視映像が伝送できないレベルにネットワーク品質が劣化した際に、自動でトラクタを安全に停止させるなど、その有効性を確認した。
(C)監視拠点で映像をパケットレベルで低遅延に複製することでネットワーク負荷を低減しながら、遠隔監視と画像解析などの複数の用途でのリアルタイム映像の同時利用を可能とするデータストリームアシスト技術を効率化。また、深層学習では、サーバ収容率を高めるために、複数の映像ストリームを効率的に処理するストリームマージ機能やCPUやGPUなど様々なリソースを最適化する推論処理基盤技術により、処理を効率化した。これらの機能により監視者の負担軽減につながる効率的な遠隔監視を実現し、その有効性を確認した。
また、農機が自動走行するためには、高精度な測位が必要。そのため、衛星信号を受信する固定局を農機の周辺環境に設置し、固定局から位置補正情報を配信することが求められる。従来は、農家が当該固定局を設置することから、費用面や運用面で農家の負担となる等の課題があった。
(D)農家による固定局の設置が不要となる、「docomo IoT高精度GNSS位置情報サービス」を用いた農機自動走行を実証。高精度の測位を実現し、有効性を確認した。これにより、低コストで高精度な測位情報の利用が可能となる。
(E)IOWNを実現する技術の一つであるクラウドGNSS測位技術を用いた農機の自動走行の実証。農機に搭載した受信機で受信されたGNSS信号と固定局からの位置補正情報を使用して、クラウド上で測位演算処理を行い、リアルタイムの測位結果を農機の自動走行の制御に使用することで、その有効性を確認した。
クラウド上で測位の演算処理を行うことで、農機のみならず、PCやタブレット等の機器でも同時に位置情報の利用が可能になる。また、樹木などの障害物が圃場周辺にある環境下で、利用にふさわしくない衛星信号を測位処理に利用して測位精度が劣化する課題に対しても、クラウド上の潤沢な計算リソースを使い、適切な衛星信号を選択することで高精度な測位を実現することが可能となる。
今後は、農機自動走行の安全性をさらに高めるため、衛星信号を用いた測位可能なエリア圏外でも農機自動走行を可能にする路面画像認識による測位補完技術の実証も行う。また、ドローンや草刈・収穫ロボット等農機以外への遠隔監視制御対象の拡大や5Gや現行光ネットワークよりもさらに高速・大容量・低遅延なIOWN関連技術の導入を通じた、より多数の農機の遠隔監視制御、より広域での農業の自動化をめざす。
さらに、農業の生産分野にとどまらず、流通・販売・消費分野にまたがるフードバリューチェーンへと取り組みを拡大。そこで構築した通信インフラを防災や健康等他分野での活用に広げる等、スマート農業を軸とした、生活に必要なさまざまなサービスのスマート化へとつながるスマートアグリシティの実現をめざす。
重要な記事



最新の記事
-
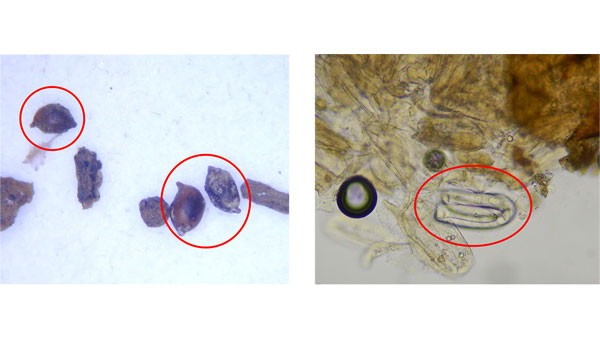 【特殊報】キャベツにテンサイシストセンチュウ 県内で初めて発生を確認 愛知県2026年4月7日
【特殊報】キャベツにテンサイシストセンチュウ 県内で初めて発生を確認 愛知県2026年4月7日 -
 【JA人事】JA八千代市(千葉県)鈴木秀昭組合長を再任(3月26日)2026年4月7日
【JA人事】JA八千代市(千葉県)鈴木秀昭組合長を再任(3月26日)2026年4月7日 -
 水田作のソーラーシェアリングの可能性【熊野孝文・米マーケット情報】2026年4月7日
水田作のソーラーシェアリングの可能性【熊野孝文・米マーケット情報】2026年4月7日 -
 中国代表決定「JA全農杯全国小学生選抜サッカー大会」優勝は「サンフレッチェ広島F.Cジュニア」2026年4月7日
中国代表決定「JA全農杯全国小学生選抜サッカー大会」優勝は「サンフレッチェ広島F.Cジュニア」2026年4月7日 -
 四国代表決定「JA全農杯全国小学生選抜サッカー大会」優勝は「徳島ヴォルティスジュニア」2026年4月7日
四国代表決定「JA全農杯全国小学生選抜サッカー大会」優勝は「徳島ヴォルティスジュニア」2026年4月7日 -
 「GREEN×EXPO 2027」ルクセンブルク、インドと公式参加契約を調印2026年4月7日
「GREEN×EXPO 2027」ルクセンブルク、インドと公式参加契約を調印2026年4月7日 -
 米ぬか由来成分が油脂中の香りを保つ効果を確認 福島大学と共同研究 築野食品工業2026年4月7日
米ぬか由来成分が油脂中の香りを保つ効果を確認 福島大学と共同研究 築野食品工業2026年4月7日 -
 秘伝のレシピを研磨 珠玉の味わい「謹製スパイスソース」新発売 エスビー食品2026年4月7日
秘伝のレシピを研磨 珠玉の味わい「謹製スパイスソース」新発売 エスビー食品2026年4月7日 -
 大輪のマンゴーのバラ「母の日限定ケーキ」予約・販売開始 カフェコムサ2026年4月7日
大輪のマンゴーのバラ「母の日限定ケーキ」予約・販売開始 カフェコムサ2026年4月7日 -
 食のバリューチェーンの再構築に挑む特別編「FVN NEOVol.5」開催2026年4月7日
食のバリューチェーンの再構築に挑む特別編「FVN NEOVol.5」開催2026年4月7日 -
 春夏秋冬で生産者を表彰 産直アウル「全国産直食材アワード2026」発表2026年4月7日
春夏秋冬で生産者を表彰 産直アウル「全国産直食材アワード2026」発表2026年4月7日 -
 亀田製菓「技のこだ割り」『dancyu祭2026』で試食体験&限定商品販売2026年4月7日
亀田製菓「技のこだ割り」『dancyu祭2026』で試食体験&限定商品販売2026年4月7日 -
 園芸用ピートモス代替 製造残渣を活用した用土用資材「Teamoss」開発 サントリー2026年4月7日
園芸用ピートモス代替 製造残渣を活用した用土用資材「Teamoss」開発 サントリー2026年4月7日 -
 エネルギーと食の地域総合インフラプロバイダー「株式会社ミツウロコアグリ」営業開始2026年4月7日
エネルギーと食の地域総合インフラプロバイダー「株式会社ミツウロコアグリ」営業開始2026年4月7日 -
 能登半島地震支援で海藻栽培の取り組み開始 シーベジタブルと連携 グリーンコープ共同体2026年4月7日
能登半島地震支援で海藻栽培の取り組み開始 シーベジタブルと連携 グリーンコープ共同体2026年4月7日 -
 新潟のブランドいちご「越後姫」スイーツ&パンまつり開催2026年4月7日
新潟のブランドいちご「越後姫」スイーツ&パンまつり開催2026年4月7日 -
 食と農林水産業の未来を協創 研修型カンファレンス「ONE SUMMIT 2026 in 新潟」開催2026年4月7日
食と農林水産業の未来を協創 研修型カンファレンス「ONE SUMMIT 2026 in 新潟」開催2026年4月7日 -
 細胞性食品・代替タンパクの最新動向を議論「第8回細胞農業会議」開催2026年4月7日
細胞性食品・代替タンパクの最新動向を議論「第8回細胞農業会議」開催2026年4月7日 -
 茨城県内初 健診事業で自治体と連携 那珂市の受診率向上に協力 パルシステム茨城 栃木2026年4月7日
茨城県内初 健診事業で自治体と連携 那珂市の受診率向上に協力 パルシステム茨城 栃木2026年4月7日 -
 1本で味付け「パパッと味付け!まろやかだし酢」新発売 パルシステム2026年4月7日
1本で味付け「パパッと味付け!まろやかだし酢」新発売 パルシステム2026年4月7日

みどり戦略




注目のテーマ

注目のテーマ

JA人事