












フィジカルAIにより収穫性能向上に向けた開発検証を実施 AGRIST2026年2月5日
AIとロボットを活用したスマート農業を提供するAGRISTは、企業や組織のイノベーションを創出する「Microsoft AI Co-Innovation Lab KOBE」(AI Co-Innovation Lab)で、生成AIを用いたAIの判断をロボット動作へ接続する仕組み"フィジカルAI"の開発検証を実施した。

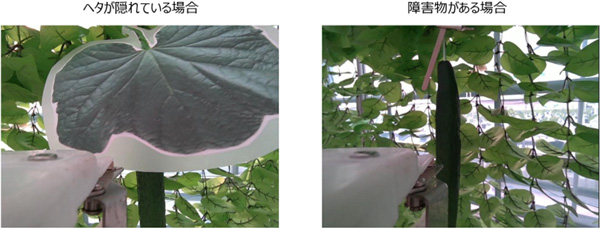
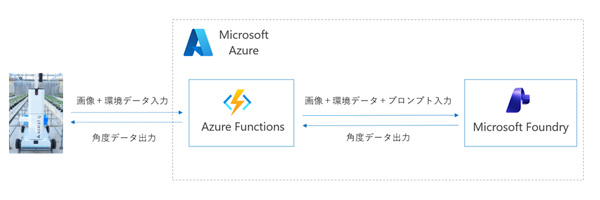
同開発検証では、収穫時に「ヘタが隠れている」「障害物がある」などの実環境要因により、自動収穫ロボットのロボットアームが対象へ適切にアプローチできないケースに着目。画像(RGB/Depth等)を入力として"回り込みの推奨角度"を生成AIが算出し、Azure Functionsを介して自動収穫ロボットから呼び出し可能なAPIとして提供することで、ロボット動作へつなぐ一連のフローを確認した。
今回の取り組みにより、将来的に収穫の成功率(収穫性能)を大きく高め得るアプローチとして、フィジカルAIの有効性と今後の拡張性に関する手応えを得ている。
AGRISTはこれまで、自動収穫ロボットの現場課題を起点に、AIによる認識・予測の高度化と、現場運用に耐えるシステム化を進めてきた。
自動収穫ロボットにおいては、対象物の位置や角度だけでなく、葉・茎・支柱など周辺環境によってロボットアームの進入経路が制限されることがあり、結果として収穫動作の失敗や時間ロスにつながるケースがある。
今回、AIの推論結果を"自動収穫ロボットが実際に動ける指示"へ変換し、環境変化にも追随しやすい形で提供する「フィジカルAI」により、収穫性能向上に向けた開発検証を行った。
◎今回の開発検証で取り組んだこと(Sprint:5日間)
(1)課題設定
・ヘタ隠れ/障害物あり等により、ロボットアームが対象へ取りに行けない(適切な進入角度が取れない)状況が発生
(2)目標
・自動収穫ロボットがAzure Functionsを呼び出し、推奨角度(回り込み角度)をJSON形式で受け取り、動作へ反映できることを確認
(3)実施内容
・Microsoft Foundry(Foundry Models)上で生成AIの推論エンドポイントを構築
・RGB/Depth等の入力データを前処理し、推論に適した形へ整形
・出力を自動収穫ロボット側で扱いやすいJSON形式に固定(レスポンスフォーマット指定)
・2ケース(ヘタ隠れ/障害物あり)を想定したAzure Functionsを構築・デプロイ
・自動収穫ロボットがAzure Functionsを起動し、返却された角度を動作へ反映するところまで確認
◎主な成果
・生成AI→角度データ→ロボット動作の一連フローを、Azure Functionsを介して疎結合に実装し、接続・動作連携を確認
・推論はノートブック検証で、概ね10〜30秒程度でレスポンスが返る感触を得た
・"分かりやすい入力(画像・前処理)"では一定の精度感が得られ、入力設計や前処理の工夫が精度向上に効く手応えを確認
重要な記事



最新の記事
-
 シンとんぼ(185)食料・農業・農村基本計画(27)麦に関するKPIと施策2026年3月21日
シンとんぼ(185)食料・農業・農村基本計画(27)麦に関するKPIと施策2026年3月21日 -
 みどり戦略対策に向けたIPM防除の実践(102)ニコチン性アセチルコリン受容体競合的モジュレーター(4)【防除学習帖】第341回2026年3月21日
みどり戦略対策に向けたIPM防除の実践(102)ニコチン性アセチルコリン受容体競合的モジュレーター(4)【防除学習帖】第341回2026年3月21日 -
 農薬の正しい使い方(75)細胞壁(セルロース)合成阻害剤【今さら聞けない営農情報】第341回2026年3月21日
農薬の正しい使い方(75)細胞壁(セルロース)合成阻害剤【今さら聞けない営農情報】第341回2026年3月21日 -
 FAO 国連食糧農業機構【イタリア通信】2026年3月21日
FAO 国連食糧農業機構【イタリア通信】2026年3月21日 -
 【浜矩子が斬る! 日本経済】平和と経済の関係 人権侵す戦争とは乖離2026年3月19日
【浜矩子が斬る! 日本経済】平和と経済の関係 人権侵す戦争とは乖離2026年3月19日 -
 3カ年計画の着実な実践へ 5つの重点取組事項 2026年度JA共済事業計画2026年3月19日
3カ年計画の着実な実践へ 5つの重点取組事項 2026年度JA共済事業計画2026年3月19日 -
 配合飼料供給価格 トン当たり約1250円値上げ 2026年4~6月期 JA全農2026年3月19日
配合飼料供給価格 トン当たり約1250円値上げ 2026年4~6月期 JA全農2026年3月19日 -
 「有機」「オーガニック」 内容知らない消費者6割強2026年3月19日
「有機」「オーガニック」 内容知らない消費者6割強2026年3月19日 -
 【世界を診る・元外交官 東郷和彦氏】米国大統領の"変貌" 日本外交も節目2026年3月19日
【世界を診る・元外交官 東郷和彦氏】米国大統領の"変貌" 日本外交も節目2026年3月19日 -
 「備蓄米の機動的買い戻しを」 米価下落懸念し特別決議 米どころ山形のJA県中央会2026年3月19日
「備蓄米の機動的買い戻しを」 米価下落懸念し特別決議 米どころ山形のJA県中央会2026年3月19日 -
 飲用に使われた桜とニセアカシアの花【酒井惇一・昔の農村・今の世の中】第381回2026年3月19日
飲用に使われた桜とニセアカシアの花【酒井惇一・昔の農村・今の世の中】第381回2026年3月19日 -
 加工食品におけるカーボンフットプリント(CFP)算定ガイドを改定 農水省2026年3月19日
加工食品におけるカーボンフットプリント(CFP)算定ガイドを改定 農水省2026年3月19日 -
 「花がなくてもかまわない消費者」にどう向き合うか【花づくりの現場から 宇田明】第81回2026年3月19日
「花がなくてもかまわない消費者」にどう向き合うか【花づくりの現場から 宇田明】第81回2026年3月19日 -
 今年は5月10日「母の日プレゼントキャンペーン」開催 JAタウン2026年3月19日
今年は5月10日「母の日プレゼントキャンペーン」開催 JAタウン2026年3月19日 -
 TOKYO FMホリデースペシャル「春のうまいもの祭」JA全農提供の3番組がコラボ2026年3月19日
TOKYO FMホリデースペシャル「春のうまいもの祭」JA全農提供の3番組がコラボ2026年3月19日 -
 【役員人事】JA三井リース(4月1日付)2026年3月19日
【役員人事】JA三井リース(4月1日付)2026年3月19日 -
 【Jミルク26年度計画】脱粉削減拡充も 生乳需給安定へ検討2026年3月19日
【Jミルク26年度計画】脱粉削減拡充も 生乳需給安定へ検討2026年3月19日 -
 第67回全国家の光大会レポート 記事活用、教育文化活動が力2026年3月19日
第67回全国家の光大会レポート 記事活用、教育文化活動が力2026年3月19日 -
 水稲など13品目に対応「土壌診断AI」開発 土壌管理の高度化と生産性向上に期待 農研機構2026年3月19日
水稲など13品目に対応「土壌診断AI」開発 土壌管理の高度化と生産性向上に期待 農研機構2026年3月19日 -
 北信地域の農業を支える新拠点「農機具王 長野中野店」4月1日オープン2026年3月19日
北信地域の農業を支える新拠点「農機具王 長野中野店」4月1日オープン2026年3月19日

みどり戦略




注目のテーマ

注目のテーマ

JA人事