












イチゴ収穫で遠隔収穫ロボット操作に成功 ネットワークとサーバが連携して通信品質を制御 NTTグループ2025年5月13日
NTTとNTT東日本、NTTアグリテクノロジー(東京、酒井大雅社長)は、ほ場にある収穫ロボットをネットワーク越しに遠隔操作し、イチゴを収穫する実証実験を行った。実験では、ネットワークの品質状況に応じたリアルタイムな動作制御により、高い操作性を維持した遠隔収穫作業が可能であることを確認した。この結果から、様々なシーンで遠隔操作が可能となり、人手不足解消につながるとしている。
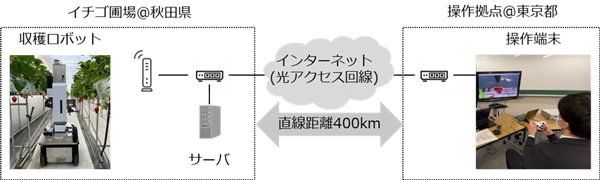 遠隔収穫システム構成図
遠隔収穫システム構成図
スマート農業でも農作業の多くは人手に頼り、人の判断を伴う遠隔操作ロボットの活用が重要だ。実用化には、ネットワーク遅延などの情報を画像処理により可視化する必要があり、高負荷状態で遅延が大きくなった場合にも操作性を低下させない仕組みが必要となっている。
実験では、東京のロボット操作者がイチゴの収穫適否を画像処理した映像を見ながら、秋田県のほ場にあるロボットを遠隔操作して、約400km(秋田-東京間直線距離)離れた場所のイチゴを収穫した。通信品質の変動にも高い操作性を維持し、ロボットを精度高く操作し、イチゴを傷つけずに収穫できることに成功した。ネットワークとサーバが連携した品質制御(ネットワークコンピュート高速クローズドループ制御技術)で、高度なイチゴ収穫動作でも遠隔操作が可能となり、ユーザビリティの高いスマート農業の実現につながるとしている。同技術は「つくばフォーラム2025」(5月15、16日)で展示する。
技術ポイントと実験結果
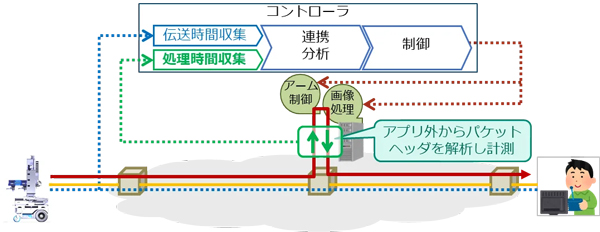 システム連携機能
システム連携機能
両拠点は光アクセス回線とインターネット回線で接続。収穫ロボットのカメラが撮影した映像を画像処理用サーバがイチゴの収穫適否を判定し、操作者はモニタに表示された情報が表示される映像を見て収穫する。モニタの表示情報とロボットアームの速度をエンドツーエンドの遅延時間に応じて変更する機能を実装し、収穫作業の操作性をどの程度向上させたのかを検証した。
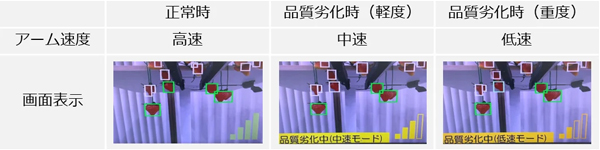 遅延速度に応じた画面表示
遅延速度に応じた画面表示
イチゴの位置にロボットアームを1回の操作で正確に移動できた割合(成功率)を測定した結果、遅延が変動する環境では成功率約50%が、同機能の活用で約80%に向上する改善が確認された。被験者(5人)全員も操作性の改善を実感したと評価した。この実験結果により、通信品質の変動に対して農業用ロボットの操作性を改善するメリットを確認し、今後は人とロボットが融合した日本の新しい農業の形の実用化に向けて取り組むとしている。
重要な記事



最新の記事
-
 【特殊報】ショウガ褐色しみ病 県内で初めて発生確認 岡山県2026年3月16日
【特殊報】ショウガ褐色しみ病 県内で初めて発生確認 岡山県2026年3月16日 -
 「世界女子カーリング選手権大会2026」日本代表を「ニッポンの食」でサポート JA全農2026年3月16日
「世界女子カーリング選手権大会2026」日本代表を「ニッポンの食」でサポート JA全農2026年3月16日 -
 「みのるダイニングフェザン盛岡店」開業9周年 人気メニューを特別価格で提供 JA全農2026年3月16日
「みのるダイニングフェザン盛岡店」開業9周年 人気メニューを特別価格で提供 JA全農2026年3月16日 -
 【人事異動】JA共済連(4月1日付)2026年3月16日
【人事異動】JA共済連(4月1日付)2026年3月16日 -
 縁日イベント ホームランバー「当たりだらけの!?アタルフェス」開催 協同乳業2026年3月16日
縁日イベント ホームランバー「当たりだらけの!?アタルフェス」開催 協同乳業2026年3月16日 -
 渋谷・原宿を脱原発訴えパレード「とめよう原発!3.7全国集会」に参加 パルシステム連合会2026年3月16日
渋谷・原宿を脱原発訴えパレード「とめよう原発!3.7全国集会」に参加 パルシステム連合会2026年3月16日 -
 秋田県に「コメリパワー横手インター店」28日に新規開店2026年3月16日
秋田県に「コメリパワー横手インター店」28日に新規開店2026年3月16日 -
 ポケマルおやこ地方留学「農山漁村振興への貢献活動に係る取組証明書」取得 雨風太陽2026年3月16日
ポケマルおやこ地方留学「農山漁村振興への貢献活動に係る取組証明書」取得 雨風太陽2026年3月16日 -
 ノズルがしまえる散粒器ノズピタ「iF DESIGN AWARD 2026」受賞 カインズ2026年3月16日
ノズルがしまえる散粒器ノズピタ「iF DESIGN AWARD 2026」受賞 カインズ2026年3月16日 -
 チーフパティシエが考案 創業30周年記念ケーキ「宇和島フェア」開催 カフェコムサ2026年3月16日
チーフパティシエが考案 創業30周年記念ケーキ「宇和島フェア」開催 カフェコムサ2026年3月16日 -
 タイミー「令和7年度 農山漁村振興への貢献活動に係る取組証明書」を取得2026年3月16日
タイミー「令和7年度 農山漁村振興への貢献活動に係る取組証明書」を取得2026年3月16日 -
 サグリ「農山漁村振興への貢献活動に係る取組証明書」を取得2026年3月16日
サグリ「農山漁村振興への貢献活動に係る取組証明書」を取得2026年3月16日 -
 9都県で生産者と消費者1087人が参加「パルシステム生消協」会員生協別交流会2026年3月16日
9都県で生産者と消費者1087人が参加「パルシステム生消協」会員生協別交流会2026年3月16日 -
 「キレイを育むサラダ習慣」特設サイトを公開 サラダクラブ2026年3月16日
「キレイを育むサラダ習慣」特設サイトを公開 サラダクラブ2026年3月16日 -
 「GREEN×EXPO 2027」オフィシャルストア 7店舗オープン 特製ステッカープレゼントキャンペーン実施2026年3月16日
「GREEN×EXPO 2027」オフィシャルストア 7店舗オープン 特製ステッカープレゼントキャンペーン実施2026年3月16日 -
 「2026年 オリコン顧客満足度(R)アワード」授賞式に出席 パルシステム連合会2026年3月16日
「2026年 オリコン顧客満足度(R)アワード」授賞式に出席 パルシステム連合会2026年3月16日 -
 シンとんぼ(184)食料・農業・農村基本計画(26)土地利用型作物に関するKPIと施策(3)2026年3月14日
シンとんぼ(184)食料・農業・農村基本計画(26)土地利用型作物に関するKPIと施策(3)2026年3月14日 -
 みどり戦略対策に向けたIPM防除の実践(101)ニコチン性アセチルコリン受容体競合的モジュレーター(3)【防除学習帖】第340回2026年3月14日
みどり戦略対策に向けたIPM防除の実践(101)ニコチン性アセチルコリン受容体競合的モジュレーター(3)【防除学習帖】第340回2026年3月14日 -
 農薬の正しい使い方(74)VLCFA(超長鎖脂肪酸)合成阻害剤【今さら聞けない営農情報】第340回2026年3月14日
農薬の正しい使い方(74)VLCFA(超長鎖脂肪酸)合成阻害剤【今さら聞けない営農情報】第340回2026年3月14日 -
 米の相対取引価格 4か月連続で下落 玄米60kg3万5056円2026年3月13日
米の相対取引価格 4か月連続で下落 玄米60kg3万5056円2026年3月13日

みどり戦略




注目のテーマ

注目のテーマ

JA人事